Bosch Sensortec Community
- Top Results
- Bosch Sensortec Community
- Discuss
- MEMS sensors forum
- BMA456 not firing interrupts
BMA456 not firing interrupts
- Subscribe to RSS Feed
- Mark Topic as New
- Mark Topic as Read
- Float this Topic for Current User
- Bookmark
- Subscribe
- Mute
- Printer Friendly Page
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
02-27-2019 03:10 PM - edited 02-28-2019 09:54 AM
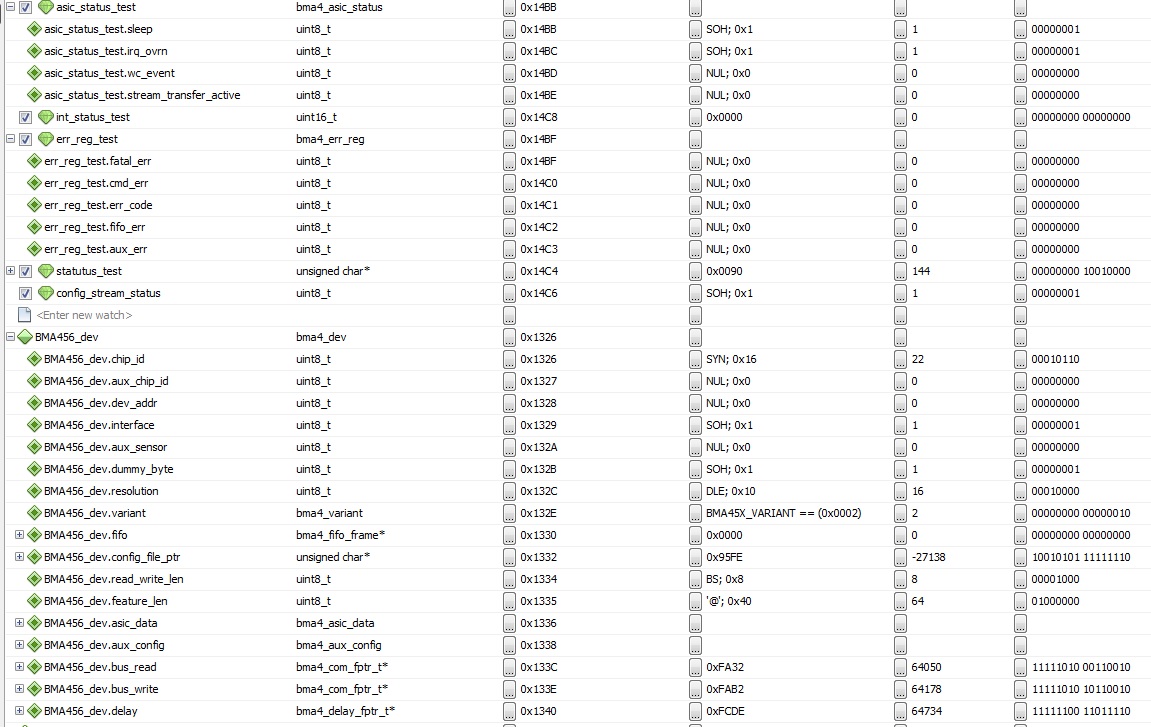
Hi, I am trying to get the ANY_MOTION/NO_MOTION feature working, but i am not able to get any interrupts from the BMA456, either from the pin or the register.
Everything looks fine, i can get accel data, the sensor returns no error. I have added a picture of the debuger with all variables values.
The code:
static void SPI_BMA456_Task_Config(void)
{
switch (SPI_BMA456_appData.BMA456_phase_config)
{
case BMA456_RESET:
// fct d'interface R/W SPI (avec attente)
BMA456_dev.bus_read=bma_SPI_read;
BMA456_dev.bus_write=bma_SPI_write;
BMA456_dev.delay= bma_delay_ms;
// init dev et lit chip id
bma456_init(&BMA456_dev);
SPI_BMA456_appData.BMA456_phase_config=BMA456_ID;
break;
// init et lecture id composant 0x16
case BMA456_ID:
// chip id lu : vérif si ok, et commence config si oui
if (BMA456_dev.chip_id==BMA456_CHIP_ID)
{
// délai 500µs
TMR3_StartTimer(TIMER3_BMA456_512uS, 1);
SPI_BMA456_appData.BMA456_phase_config=BMA456_WAIT500;
}
break;
// délai avant envoi config
case BMA456_WAIT500:
// si fin délai, suite
if (timer3_fini())
{
SPI_BMA456_appData.BMA456_phase_config=BMA456_FEATURES;
}
break;
// envoie le fichier de config
case BMA456_FEATURES:
// disable power, envoie bloc de config, enable power save, lit status 2A, vérif OK, lit adr config
if (bma456_write_config_file(&BMA456_dev)==BMA4_OK)
SPI_BMA456_appData.BMA456_phase_config=BMA456_CONFIG;
else
SPI_BMA456_appData.BMA456_phase_config=BMA456_ID; // délai + nouvel essai
break;
// config fonctionnement
case BMA456_CONFIG:
{
bma4_set_advance_power_save(BMA4_DISABLE, &BMA456_dev);
/* moved to BMA4.c before rslt|=bma4_write_regs(BMA4_INIT_CTRL_ADDR, &config_load, 1, dev);
* otherwise no_motion parameter not changed
//------------------------------------------------------------------------------
if (BMA4_OK!=bma4_set_interrupt_mode(BMA4_LATCH_MODE, &BMA456_dev)) DEBUG_MSG("bma4_set_interrupt_mode failed",DBGmask_BMA456);
if (BMA4_OK!=bma456_map_interrupt(BMA4_INTR1_MAP, BMA456_ANY_NO_MOTION_INT, BMA4_ENABLE, &BMA456_dev)) DEBUG_MSG("bma456_map_interrupt1 failed",DBGmask_BMA456);
if (BMA4_OK!=bma456_map_interrupt(BMA4_INTR2_MAP, BMA4_FIFO_WM_INT, BMA4_ENABLE, &BMA456_dev)) DEBUG_MSG("bma456_map_interrupt2 failed",DBGmask_BMA456);
//3) config Interrupts ports
struct bma4_int_pin_config int1_config;
int1_config.edge_ctrl = BMA4_LEVEL_TRIGGER;
int1_config.lvl = BMA4_ACTIVE_LOW;//BMA4_ACTIVE_HIGH;//BMA4_ACTIVE_LOW
int1_config.od = BMA4_PUSH_PULL;
int1_config.output_en = BMA4_OUTPUT_ENABLE;
int1_config.input_en = BMA4_INPUT_DISABLE;
if (BMA4_OK!=bma4_set_int_pin_config(&int1_config,BMA4_INTR1_MAP, &BMA456_dev)) DEBUG_MSG("bma4_set_int1_pin_config failed",DBGmask_BMA456);
struct bma4_int_pin_config int2_config;
int2_config.edge_ctrl = BMA4_LEVEL_TRIGGER;
int2_config.lvl = BMA4_ACTIVE_HIGH;
int2_config.od = BMA4_PUSH_PULL;
int2_config.output_en = BMA4_OUTPUT_ENABLE;
int2_config.input_en = BMA4_INPUT_DISABLE;
if (BMA4_OK!=bma4_set_int_pin_config(&int2_config,BMA4_INTR2_MAP, &BMA456_dev)) DEBUG_MSG("bma4_set_int2_pin_config failed",DBGmask_BMA456);
//------------------------------------------------------------------------------
struct bma456_anymotion_config nomotion_conf;
nomotion_conf.duration = 5;//250;//250*20ms=5sec
nomotion_conf.threshold = 0xAA;//default 0.083g
nomotion_conf.nomotion_sel = 1;//set when NO_MOTION enabled
if (BMA4_OK!=bma456_set_any_motion_config(&nomotion_conf, &BMA456_dev)) DEBUG_MSG("bma456_set_any_motion_config failed",DBGmask_BMA456);
//------------------------------------------------------------------------------
struct bma4_accel_config accel_conf;
// valeurs dans BMA4_defs.h
accel_conf.odr=BMA4_OUTPUT_DATA_RATE_200HZ; // Output data rate in Hz
accel_conf.bandwidth=BMA4_ACCEL_OSR4_AVG1; // Bandwidth parameter, determines filter configuration
accel_conf.perf_mode=BMA4_CONTINUOUS_MODE; // Filter performance mode
accel_conf.range=BMA4_ACCEL_RANGE_4G; // G-range
if (BMA4_OK!=bma4_set_accel_config(&accel_conf, &BMA456_dev)) DEBUG_MSG("bma4_set_accel_config failed",DBGmask_BMA456);
//------------------------------------------------------------------------------
// enable composant
if (BMA4_OK!=bma4_set_accel_enable(BMA4_ENABLE, &BMA456_dev)) DEBUG_MSG("bma4_set_accel_enable failed",DBGmask_BMA456);
if (BMA4_OK!=bma456_anymotion_enable_axis(BMA456_ALL_AXIS_EN, &BMA456_dev)) DEBUG_MSG("bma456_anymotion_enable_axis failed",DBGmask_BMA456);
if (BMA4_OK!=bma456_feature_enable(BMA456_NO_MOTION, BMA4_ENABLE, &BMA456_dev)) DEBUG_MSG("bma456_feature_enable2 failed",DBGmask_BMA456);
//------------------------------------------------------------------------------
*/
// check config
uint8_t interrupt_mode_test;
if (BMA4_OK!=bma4_get_interrupt_mode(&interrupt_mode_test, &BMA456_dev)) DEBUG_MSG("bma4_set_interrupt_mode failed",DBGmask_BMA456);
struct bma4_int_pin_config int1_config_test;
if (BMA4_OK!=bma4_get_int_pin_config(&int1_config_test,BMA4_INTR1_MAP, &BMA456_dev)) DEBUG_MSG("bma4_get_int1_pin_config failed",DBGmask_BMA456);
struct bma4_int_pin_config int2_config_test;
if (BMA4_OK!=bma4_get_int_pin_config(&int2_config_test,BMA4_INTR2_MAP, &BMA456_dev)) DEBUG_MSG("bma4_get_int2_pin_config failed",DBGmask_BMA456);
struct bma456_anymotion_config nomotion_conf_verif;
nomotion_conf_verif.duration = 5;//250;//250*20ms=5sec
nomotion_conf_verif.threshold = 0xAA;//default 0.083g
nomotion_conf_verif.nomotion_sel = 1;//set when NO_MOTION enabled
struct bma456_anymotion_config nomotion_conf_read;
if (BMA4_OK!=bma456_get_any_motion_config(&nomotion_conf_read, &BMA456_dev)) DEBUG_MSG("bma456_get_any_motion_config failed",DBGmask_BMA456);
if ((nomotion_conf_verif.duration!=nomotion_conf_read.duration)|(nomotion_conf_verif.threshold!=nomotion_conf_read.threshold)|(nomotion_conf_verif.nomotion_sel!=nomotion_conf_read.nomotion_sel)) DEBUG_MSG("any_motion_config failed",DBGmask_BMA456);
struct bma4_accel_config accel_conf_verif;
// valeurs dans BMA4_defs.h
accel_conf_verif.odr=BMA4_OUTPUT_DATA_RATE_200HZ; // Output data rate in Hz
accel_conf_verif.bandwidth=BMA4_ACCEL_OSR4_AVG1; // Bandwidth parameter, determines filter configuration
accel_conf_verif.perf_mode=BMA4_CONTINUOUS_MODE; // Filter performance mode
accel_conf_verif.range=BMA4_ACCEL_RANGE_4G; // G-range
struct bma4_accel_config accel_conf_read;
if (BMA4_OK!=bma4_get_accel_config(&accel_conf_read, &BMA456_dev)) DEBUG_MSG("bma4_get_accel_config failed",DBGmask_BMA456);
if ((accel_conf_verif.odr!=accel_conf_read.odr)|(accel_conf_verif.bandwidth!=accel_conf_verif.bandwidth)|(accel_conf_verif.perf_mode!=accel_conf_read.perf_mode)|(accel_conf_verif.range!=accel_conf_read.range)) DEBUG_MSG("bma4_set_accel_config failed",DBGmask_BMA456);
// check enabled composant
uint8_t accel_enabled;
if (BMA4_OK!=bma4_get_accel_enable(&accel_enabled, &BMA456_dev)) DEBUG_MSG("bma4_set_accel_enable failed",DBGmask_BMA456);
if (accel_enabled==BMA4_ENABLE) DEBUG_MSG("accel enabled",DBGmask_BMA456);
struct bma456_anymotion_config nomotion_enabled;
if (BMA4_OK!=bma456_get_any_motion_config(&nomotion_enabled, &BMA456_dev)) DEBUG_MSG("bma456_get_any_motion_config failed",DBGmask_BMA456);
if (1==nomotion_enabled.nomotion_sel) DEBUG_MSG("no_motion enabled",DBGmask_BMA456);
//***STATUS CHECK***************************************************************
struct bma4_asic_status asic_status_test;
if (BMA4_OK!=bma4_get_asic_status(&asic_status_test, &BMA456_dev)) DEBUG_MSG("bma4_set_accel_enable failed",DBGmask_BMA456);
struct bma4_err_reg err_reg_test;
bma4_get_error_status(&err_reg_test, &BMA456_dev);
uint8_t *statutus_test;
bma4_get_status(&statutus_test, &BMA456_dev);
uint8_t config_stream_status;
bma4_read_regs(BMA4_INTERNAL_STAT, &config_stream_status, 1, &BMA456_dev);
uint16_t int_status_test = 0;
if (BMA4_OK!=bma456_read_int_status(&int_status_test, &BMA456_dev)) DEBUG_MSG("bma456_read_int_status failed",DBGmask_BMA456);
if (BMA4_OK!=bma456_read_int_status(&int_status_test, &BMA456_dev)) DEBUG_MSG("bma456_read_int_status failed",DBGmask_BMA456);
//***END STATUS CHECK***********************************************************
bma4_set_advance_power_save(BMA4_ENABLE, &BMA456_dev);
SPI_BMA456_appData.BMA456_phase_config=BMA456_READY; // prêt pour faire des mesures
};
break;
// fin de config
case BMA456_READY:
default:
break;
}
}Any clues?
With all my thanks.
EDITED: code cleanup
Solved! Go to Solution.
{kind=link}
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
02-27-2019 04:36 PM
do i need a soft reset after the init? (https://github.com/BoschSensortec/BMA400-API/blob/master/examples/step_counter.c line 26)
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
03-04-2019 01:34 PM - edited 06-19-2019 06:46 PM
Please note that the sample code you linked is for the BMA400 rather than the BMA456. A (soft) reset is typically not necessary, but can be used to restore a known configuration/state to a sensor.
Regarding BMA456's interrupt not firing, it is not clear why it is not working based on your sample code. Re-using your configuration for the accelerometer and the no-motion feature, I have written the attached example code. This example successfully runs in COINES (available from our Downloads page, Software tab) and confirms the no-motion interrupt is working by checking the level of the INT1 pin, as well as verifying the interrupt source in the INT_STATUS registers. It prints acceleration data in the console during motion, and a debug message if the no-motion interrupt is triggered.
Still looking for something?
- Top Results