Bosch Sensortec Community
- Top Results
- Bosch Sensortec Community
- Discuss
- MEMS sensors forum
- Re: BMI088 bias jump around 0dps
BMI088 bias jump around 0dps
- Subscribe to RSS Feed
- Mark Topic as New
- Mark Topic as Read
- Float this Topic for Current User
- Bookmark
- Subscribe
- Mute
- Printer Friendly Page
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
07-23-2021 10:29 AM - edited 07-23-2021 10:32 AM
Hello.
I am evaluating BMI088 for navigation applications.
I need to verify the gyro nonlinearity error within a relatively small angular range (-10dps to +10dps).
The test was done in the following steps.
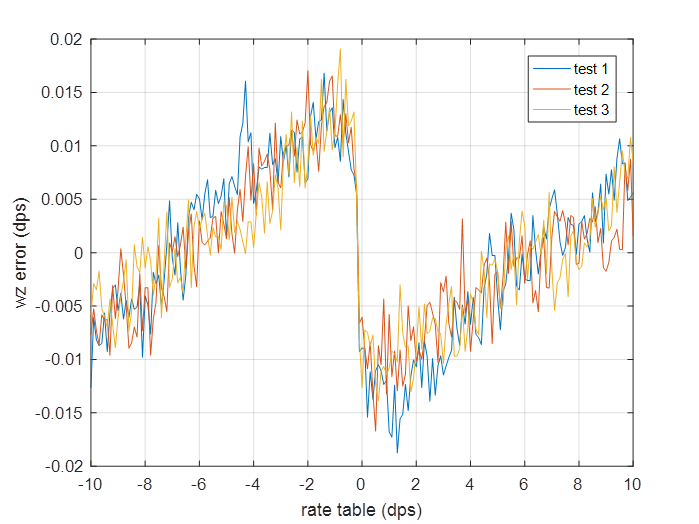
- The sensor was fixed on a rate table. The rate table rotated from -10 dps to 10 dps with a step of 0.1 dps. The rate table stayed at each step for 12s.
- Collect gyro output when the rate table stayed at constant angular rate, and the gyro output was averaged to remove noise.
- Compare the Z axis gyro output with the rate table set rate.
3.1 The gyro output was first calibrated using best fitting straight line to correct scale factor and bias error.
3. 2 The calibrated gyro output at each step was compared with the set value to calculate the error which is considered as nonlinearity.
- The test was repeated for three times.
We can clearly see that when the rate table rate crosses 0dps, there is a jump in the gyro output. We tested a few units and all the units show similar behavior.
It seems there is some ADC error. Could any one help to explain and provide some kind of configuration to fix this? Thank you.

Solved! Go to Solution.
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
08-04-2021 07:51 AM
Hello dxglaw,
What is the accuracy of your rate table?
From your test result, it is under spec.

- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
08-04-2021 08:47 AM
Hi BSTRobin,
For continuous rotation, the rate table accuracy is 0.001 dps.
I understand the error is within spec. However, as this error seems a systematic error instead of a random error, I wander if there is any configuration or future plan that can fix this.
Besides, although the nonlinearity error is samll, just imagine the following case.
1. the vehicle drives in a straight line.
2. the gyro output varies around 0dps.
3. the bias of the gyro jumps when the rate crosses 0dps.
4. this creates a bias instability much worse than the spec.
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
08-04-2021 09:42 AM
Hello dxglaw,
Thanks for your feedback.
1.We had test equipment and would like to do the test with yours. Could we know the detailed test steps?
2.For the Y axis value, could we know how the value of the Y axis is calculated?
.png")
{kind=link}
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
08-05-2021 02:14 AM - edited 08-05-2021 02:16 AM
Hi BSTRobin,
Thank you.
The test was done in the following steps.
- The sensor was fixed on a rate table. The rate table rotated from -10 dps to 10 dps with a step of 0.1 dps. The rate table stayed at each step for 12s.
- Collect gyro output when the rate table stayed at constant angular rate, and the gyro output was averaged to remove noise.
- Compare the Z axis gyro output with the rate table set rate.
3.1 The gyro output was first calibrated using best fitting straight line to correct scale factor and bias error.
3. 2 The calibrated gyro output at each step was compared with the set value to calculate the error which is considered as nonlinearity.
- The test was repeated for three times.
If there is any question, pelase let me know.
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
08-05-2021 11:42 AM
Hello dxglaw,
From you test result, Z axis of BMI088 gyro had jump. Could we know the test result of BMI088 X, Y axis? Did them also had jump?
Still looking for something?
- Top Results