Bosch Sensortec Community
- Top Results
- Bosch Sensortec Community
- Discuss
- MEMS sensors forum
- BMI160 Roll And Pitch Values Stability
BMI160 Roll And Pitch Values Stability
- Subscribe to RSS Feed
- Mark Topic as New
- Mark Topic as Read
- Float this Topic for Current User
- Bookmark
- Subscribe
- Mute
- Printer Friendly Page
BMI160 Roll And Pitch Values Stability
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
01-24-2021 01:05 AM
Hello,
I am using the BMI160 sensor with NodeMcu over I2C. The project that i'm trying to do is, obtaining the roll and pitch values from the sensors. After i get roll and pitch values from sensors i'll obtain the inclination.
My problem is, values that the sensor provide me are not stable, even if i doesn't move the BMI160, there can be inconsistency between obtained values. For example in the first read for the roll value is "-12.62" and in the second read the value is "-12.55".
So i wonder if those values are fine according to sensitivity of the sensor or am I doing something wrong, also are there anything that i can do for keep the values more stable?
Please see the used code below (The code is derived from the : https://makers-with-myson.blog.ss-blog.jp/2020-06-14).
#include <Wire.h>
#include <math.h>
#include <BMI160Gen.h>
#define PRINT_PROCESSING
#define BAUDRATE 9600
#define SENSE_RATE 100
#define GYRO_RANGE 2000
#define ACCL_RANGE 16
#define SENSOR1 0x69
#define deg_to_rad(a) (a/180*M_PI)
#define rad_to_deg(a) (a/M_PI*180)
float convertRawGyro(int gRaw) {
// ex) if the range is +/-500 deg/s: +/-32768/500 = +/-65.536 LSB/(deg/s)
float lsb_omega = float(0x7FFF) / GYRO_RANGE;
return gRaw / lsb_omega; // deg/sec
}
float convertRawAccel(int aRaw) {
// ex) if the range is +/-2g ; +/-32768/2 = +/-16384 LSB/g
float lsb_g = float(0x7FFF) / ACCL_RANGE;
return aRaw / lsb_g;
}
static float gyro_roll = 0, gyro_pitch = 0, gyro_yaw = 0;
static float comp_roll = 0, comp_pitch = 0;
static unsigned long last_mills = 0;
void print_roll_pitch()
{
// read raw accl measurements from device
int rawXAcc, rawYAcc, rawZAcc; // x, y, z
BMI160.readAccelerometer(rawXAcc, rawYAcc, rawZAcc);
float accX = convertRawAccel(rawXAcc);
float accY = convertRawAccel(rawYAcc);
float accZ = convertRawAccel(rawZAcc);
float rad_a_roll = atan2(accY, accZ);
float rad_a_pitch = atan2(-accX, sqrt(accY*accY + accZ*accZ));
float accl_roll = rad_to_deg(rad_a_roll);
float accl_pitch = rad_to_deg(rad_a_pitch);
// read raw gyro measurements from device
int rawRoll, rawPitch, rawYaw; // roll, pitch, yaw
BMI160.readGyro(rawRoll, rawPitch, rawYaw);
float omega_roll = convertRawGyro(rawRoll);
float omega_pitch = convertRawGyro(rawPitch);
float omega_yaw = convertRawGyro(rawYaw);
unsigned long cur_mills = micros();
unsigned long duration = cur_mills - last_mills;
last_mills = cur_mills;
double dt = duration / 1000000.0; // us->s
if (dt > 0.1) return;
// Gyro data
gyro_roll += omega_roll * dt; // (ms->s) omega x time = degree
gyro_pitch += omega_pitch * dt;
gyro_yaw += omega_yaw * dt;
// Complementary filter data
comp_roll = 0.93 * (comp_roll + omega_roll * dt) + 0.07 * accl_roll;
comp_pitch = 0.93 * (comp_pitch + omega_pitch * dt) + 0.07 * accl_pitch;
#ifdef PRINT_PROCESSING
static int n = 0;
if (n != 50) {
++n; return;
}
n = 0;
Serial.print(comp_roll);
Serial.print(",");
Serial.print(comp_pitch);
Serial.print(",");
#endif
Serial.println();
}
void setup() {
Serial.begin(BAUDRATE);
BMI160.begin(BMI160GenClass::I2C_MODE);
BMI160.setGyroRate(SENSE_RATE);
BMI160.setAccelerometerRate(SENSE_RATE);
BMI160.setGyroRange(GYRO_RANGE);
BMI160.setAccelerometerRange(ACCL_RANGE);
BMI160.begin(BMI160GenClass::I2C_MODE, SENSOR1);
BMI160.setXAccelOffset(0);
BMI160.setYAccelOffset(0);
BMI160.setZAccelOffset(0);
BMI160.setXGyroOffset(0);
BMI160.setYGyroOffset(0);
BMI160.setZGyroOffset(0);
delay(100);
/* Set kalman and gyro starting angle */
int rawXAcc, rawYAcc, rawZAcc;
BMI160.readAccelerometer(rawXAcc, rawYAcc, rawZAcc);
float accX = convertRawAccel(rawXAcc) + 0.01;
float accY = convertRawAccel(rawYAcc) + 0.01;
float accZ = convertRawAccel(rawZAcc) + 0.01;
float roll = rad_to_deg(atan(accY / accZ));
float pitch = rad_to_deg(atan(-accX / sqrt(accY * accY + accZ * accZ)));
// Set starting angle
gyro_roll = comp_roll = roll;
gyro_pitch = gyro_pitch = pitch;
}
void loop() {
print_roll_pitch();
}
Any kind of information is appreciated
Thanks.
Mehmet
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
01-25-2021 02:34 AM
Hi Sir:
Could you offer the raw data and your setting to us ?
When no movement, noise or temperature change will affect the sensor data as well. And based on the different ODR and filter setting, noise also is different.
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
01-25-2021 11:12 AM
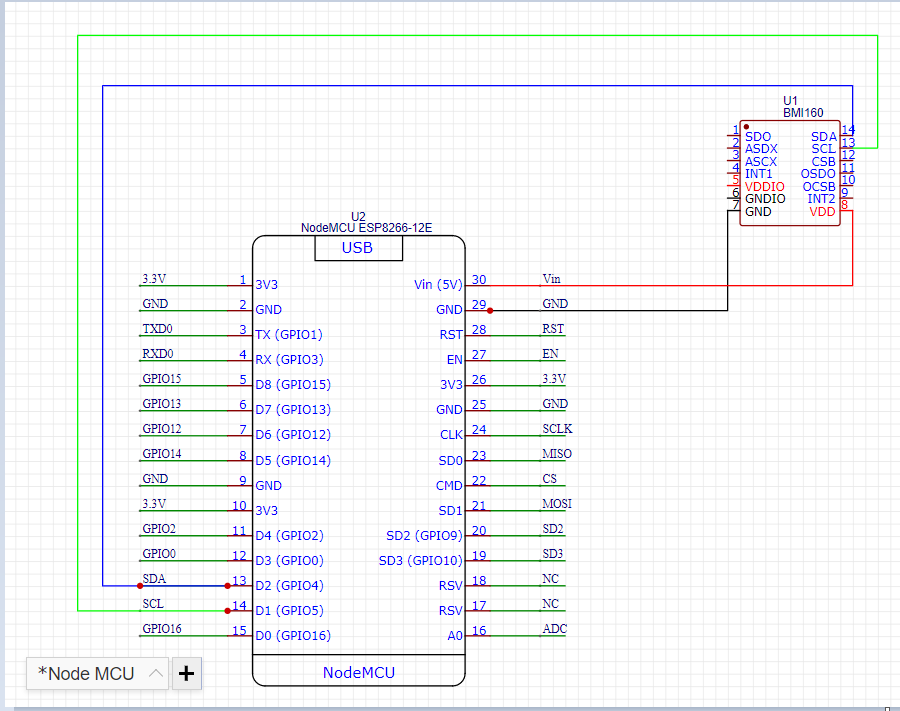
Hi Jet, thanks for reply. Setting of circuit in the attachment.
What can i do to reduce noise? Also if i use long cable to connect the sensor, would that effect the noise factor? And lastly, i'm plannig on connecting the multiplexer to control multiple sensors, would that causes any problem in terms of noise factor?
{kind=link}
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
01-27-2021 03:04 AM - edited 01-27-2021 03:05 AM
Hi Sir:
You should reduce noise by software and/or hardware filter. Please see the datasheet of BMI160 2.4 Data processing to know how to set hardware filter.
And you also can achieve this feature by your own algorithm.
If you use long cable to connect the sensor and transmit and receive data, it is easy to be interfered and lead to the signal quality unstable.
Long cable is connected between sensor and host is not recommended.
Or if it is inevitable, you might try to add a resistance close to host between them to form impedance matching circuit and then observe the results.
The impedance matching problematic is only based on experience to be suggested, I am not sure that it is useful for your project.
Hopefully, it can help you.
Still looking for something?
- Top Results