Bosch Sensortec Community
- Top Results
- Bosch Sensortec Community
- Discuss
- MEMS sensors forum
- Re: BMP388 Normal mode reading not compatible with forced mode
BMP388 Normal mode reading not compatible with forced mode
- Subscribe to RSS Feed
- Mark Topic as New
- Mark Topic as Read
- Float this Topic for Current User
- Bookmark
- Subscribe
- Mute
- Printer Friendly Page
BMP388 Normal mode reading not compatible with forced mode
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
09-21-2020 11:19 AM - edited 09-21-2020 11:20 AM
Hi,
We're using BMP388 to get a proper pressure reading on a board with other sensors (GPS, Motion sensors), which will be collaborated with the weather station data.
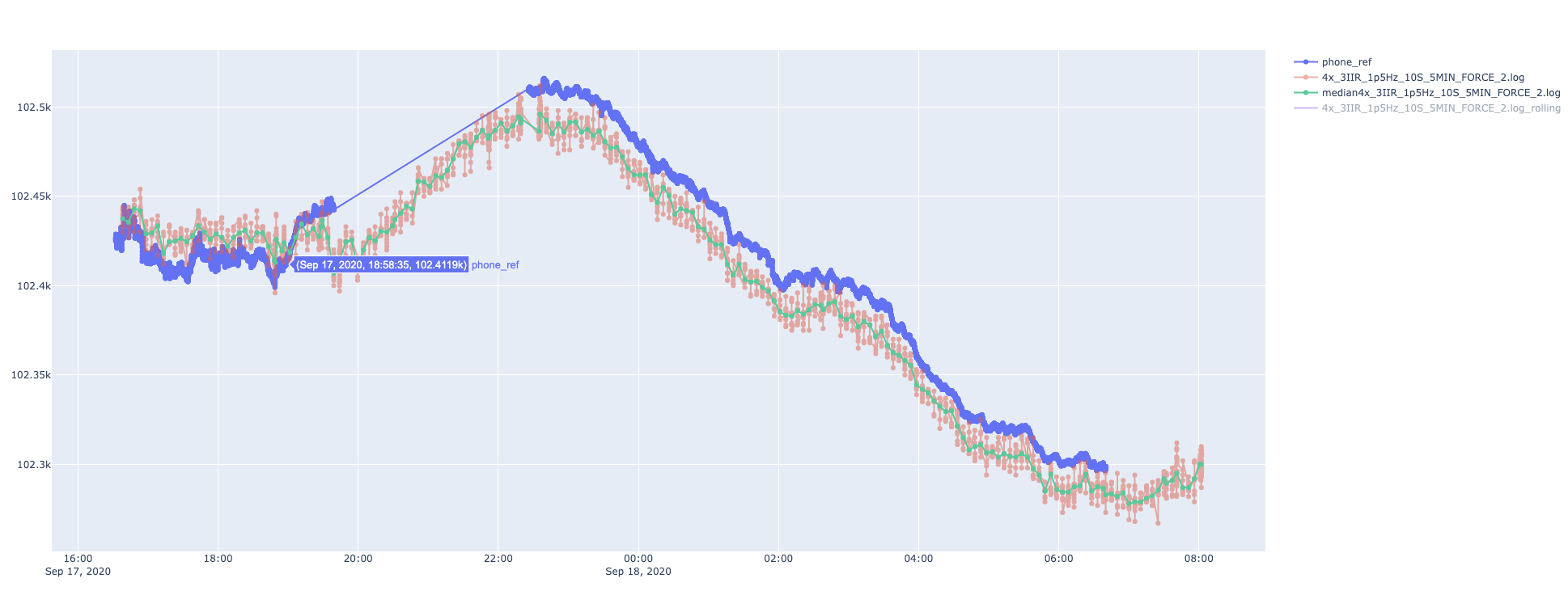
However, we ran into a problem that when the normal mode is used, there's is an obvious drift from the reference data we took from the iPhone. This behavior is on the other hand not shown in the forced mode.
The settings for pressure data are as follow:
- BMP3_OVERSAMPLING_4X
- BMP3_NO_OVERSAMPLING
- BMP3_IIR_FILTER_COEFF_3
- BMP3_ODR_1_5_HZ
- BMP3_FORCED_MODE and BMP3_NORMAL_MODE
Please see attachment, normal_mode.png, for the drift, increased for about 40 Pa when minor changes from reference, at the beginning, and then it follows with a huge jump for about 80 Pa.
1.) We do find that the huge jump is couple to the start and end of a high power consumed sensor but in theory that shouldn't be the source of a corrupted reading but this only happens with Normal mode yet not in forced mode with the exact scenario.
Do you have any experience with this behavior?
2.) Apart from the above problem, we also noticed that the mean value of normal mode and forced mode are quite different. i.e. the difference to the reference/ absolute pressure is about 3hPa in different modes with IIR disabled. Also not a behavior a user would expect from the node.
Would you please explain to us where does the difference coming from?
(we did check the data ready register before reading the pressure value out)
Thanks,
Tsung
{kind=link}
{kind=link}
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
10-03-2020 01:41 AM
Can you try to use FIFO on BMP388 to store the data under normal mode?
Then read out the data when FIFO is full.
I want to understand this test case compare to Force mode and your current normal mode result.
In general, i don't expect there is so big difference on Force mode and normal mode.
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
10-06-2020 02:37 AM
Still looking for something?
- Top Results