Bosch Sensortec Community
- Top Results
- Bosch Sensortec Community
- Discuss
- MEMS sensors forum
- BNO055 high Euler Angles Drift with Vibration
BNO055 high Euler Angles Drift with Vibration
- Subscribe to RSS Feed
- Mark Topic as New
- Mark Topic as Read
- Float this Topic for Current User
- Bookmark
- Subscribe
- Mute
- Printer Friendly Page
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
02-17-2021 04:30 PM - edited 02-18-2021 07:40 AM
I've recently bought BNO055 to measure my vehicles RPY angles. However given RPY values are steadly increasing even the vehicle is standing still.
I've conducted several tests to gather some data. For reference purposes I put some cheap IMU side by side to compare results. However cheap IMU is giving much more stable resulsts than BNO055.
Note0: Bosch imu is fully calibrated and the results are not changing by updating modes. I've tried to recalibrate too.
Note1: I tried to get fused quaternions and they are still drifting.
Note2: I uploaded the log data to github.
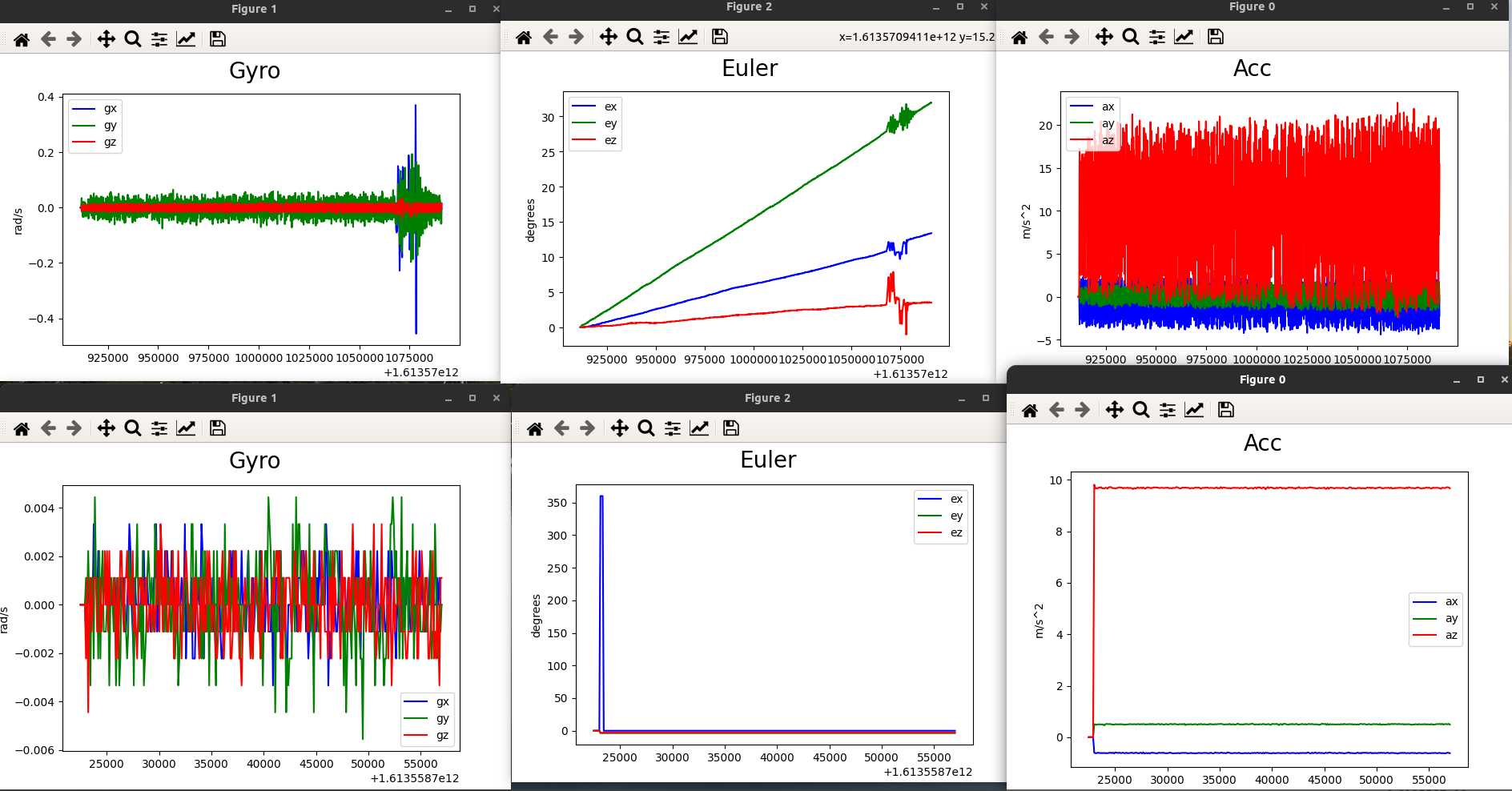
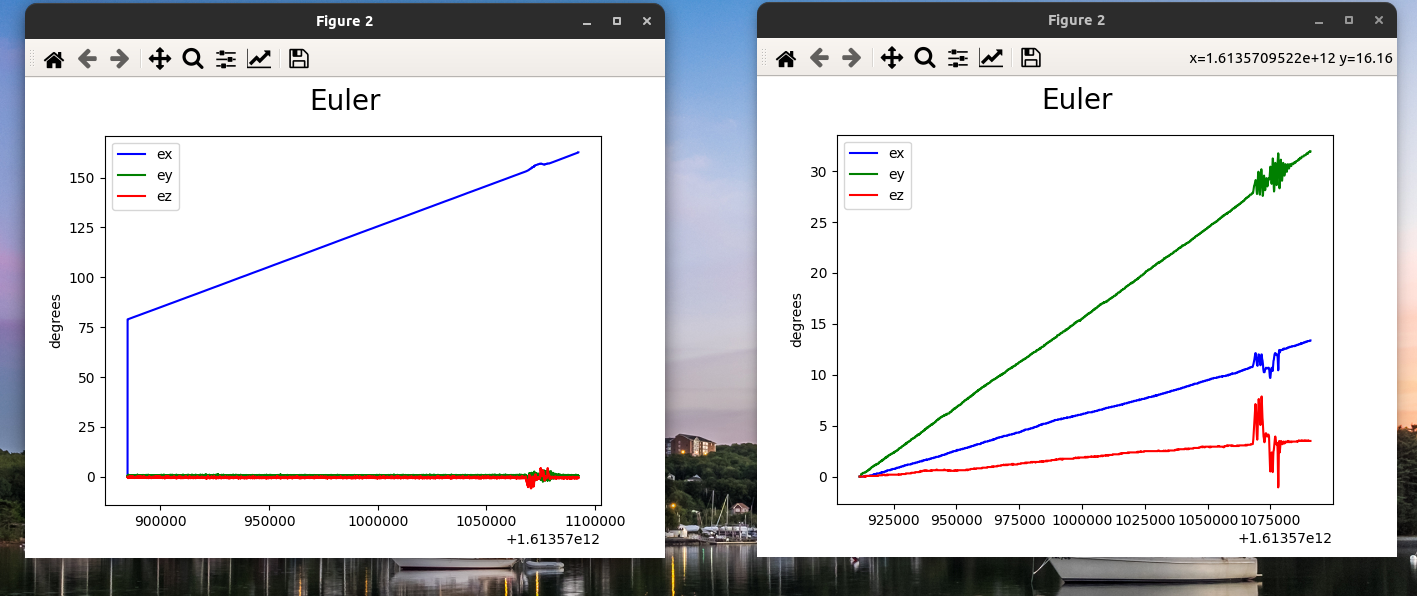
I've attached the results below. First Picture compares Bosch IMU with/without vibration. Second picture compares bosch and reference IMU with vibration present.
Thanks.
Solved! Go to Solution.
{kind=link}
{kind=link}
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
02-23-2021 07:18 AM
Hi Sir:
Before measure your vehicles RPY angles, you need to finish its calibration, include ACC/GYRO/MAG/SYSTEM.
If the vehicle kept standing still and RPY values were still steadly increasing, we can print the raw data of three sensors to observe them normal or not.
I checked log_pump.csv, its acc and euler angle is unstable.
I checked log_stable.csv, I didn't find it abnormal.
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
02-26-2021 01:30 PM
Hi, I've calibrate the sensor prior to measurements. When standing still measurements are fine but on the robot, when the vibrtion is present, its highly unstable.
Thanks.
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
03-02-2021 03:53 AM
Hi Sir:
When the vibration is present, except gyro accuracy, are other accuracies changed ? They are still 3?
Do you check your BNO055 version, include SW version and other version?
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
03-09-2021 04:47 PM
During the tests, except for magnometer other sensor status hold still at 3 (fully calibrated). Magnometer mostly showed 0 or 1 during the tests even I've calibrated it with all the otherst prior the testst. .Could you please point me out where to check versions.
Still looking for something?
- Top Results