Bosch Sensortec Community
- Top Results
- Bosch Sensortec Community
- Discuss
- MEMS sensors forum
- BNO055 "Self Test Failed" and "Fusion algorithm configuration error"
BNO055 "Self Test Failed" and "Fusion algorithm configuration error"
- Subscribe to RSS Feed
- Mark Topic as New
- Mark Topic as Read
- Float this Topic for Current User
- Bookmark
- Subscribe
- Mute
- Printer Friendly Page
BNO055 "Self Test Failed" and "Fusion algorithm configuration error"
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
10-18-2021 04:33 AM - edited 10-18-2021 05:14 AM
Hi
I am using the BNO055 with the Bosch api.
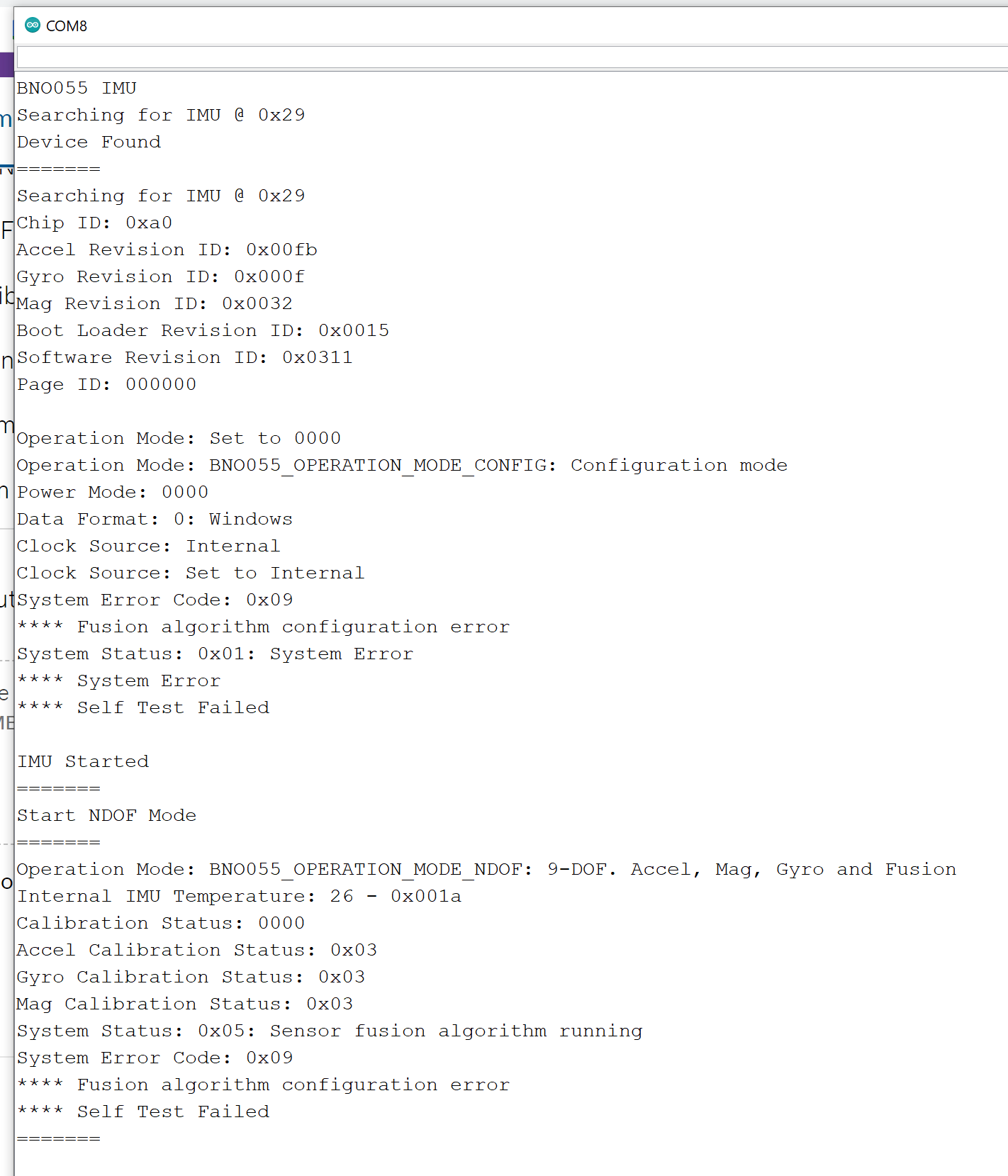
On startup, in the CONFIG Mode, I get those errors: "Self Test Failed" and "Fusion algorithm configuration error"
And when I load 9-DOF Mode, I get the same errors.
If I reset the sensor, the "Fusion algorithm configuration error" does not show again, but the self-test still fails.
Also, without doing calibration, and having the IMU placed still on the bench, the calibration results for Accel, Gyro and Mag always read 0x03 instantly after power-on, which is not realistic.
I get the same response with more than one IMU.
I am not sure what I am doing wrong.
I attached the log from the IMU that I capture during startup
any help ? thanks
{kind=link}
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
10-18-2021 07:38 AM
Hello Salam,
Do you refer example code from github? https://github.com/BoschSensortec/BNO055_driver/blob/master/bno055_support.c
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
10-18-2021 03:49 PM
Hi
I only used the bno055.c and bno055.h library files in the same GitHub. I did not use the bno055_support.c
thanks
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
10-19-2021 04:08 AM
Hello Salam,
bno055_support.c is an example code that how to call bno055.c.
Still looking for something?
- Top Results