Bosch Sensortec Community
- Top Results
- Bosch Sensortec Community
- Discuss
- MEMS sensors forum
- Orientation Error in Yaw of BNO055 in 9DOF Mode?
Orientation Error in Yaw of BNO055 in 9DOF Mode?
- Subscribe to RSS Feed
- Mark Topic as New
- Mark Topic as Read
- Float this Topic for Current User
- Bookmark
- Subscribe
- Mute
- Printer Friendly Page
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
11-20-2020 06:44 AM
Hello All,
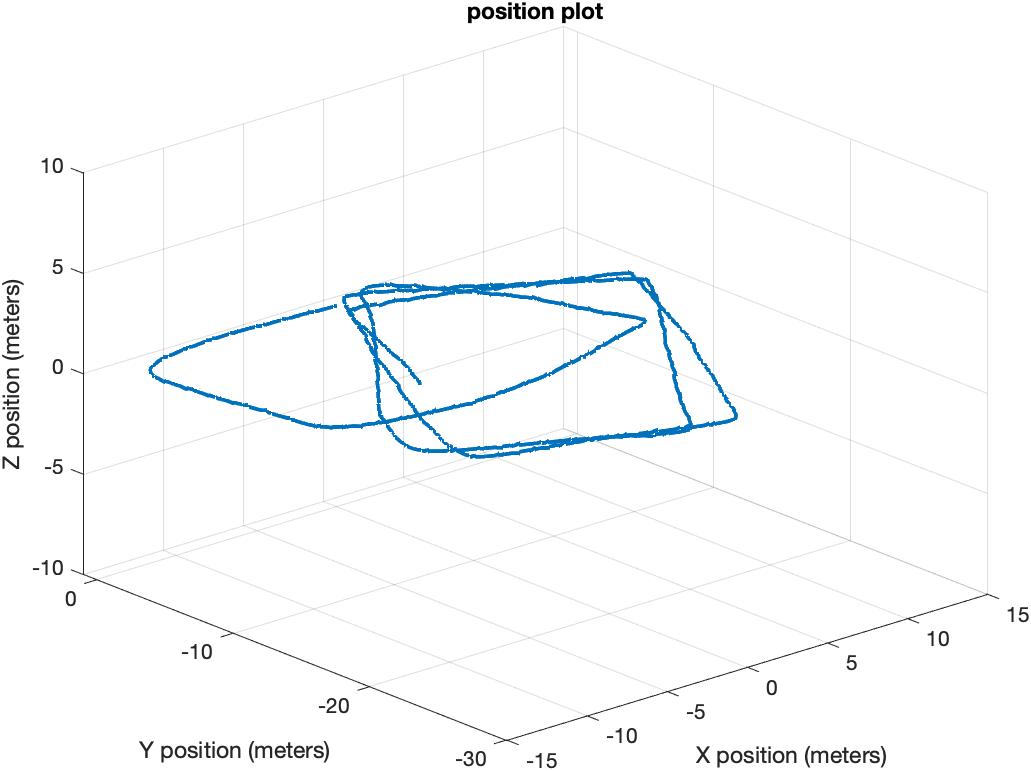
I am trying ot use a BNO055 sensor for Inertial Navigation and Pedestrain Dead reckoning. While i was doing some indoor tetsing the other day i got some very strange results that I suspct are errors in the yaw of the sensor. I had the sensor set to 9DOF mode.
For this test, i walked around a large square three times. Does anyone know what could be causing this change in orientation in the data... it looks like the orientation outputted from the BNO055 in 9DOF mode is not working.
As you can see in the photo, the yaw of the sesnor changes, does anyone have any ideas what may be causing this? could i be something to do with the calibration of the sensor? I already know that doing tests indoor with a magnetometer may be error prone.
Thank you for your help.
Solved! Go to Solution.
{kind=link}
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
11-20-2020 08:06 AM
Hello A_Levy,
Could we know current ACC, GYRO, MAG calibration status when you got the result?
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
11-20-2020 08:11 AM
Hello,
CA = 3, CG = 3, CM = 3?, and CS = 3?
I put quetsion marks beside the CM and CS because i belive that they were at 3, the program we have made may not be updating the calibration status perfectly. I know taht i need to double check the calibration status of the magneometer.
Would an uncakibrated magnetometer cause this much error? Or, could there be other sources of error that i am not realizing? The building that i did this testing in was just a normal apartment building.
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
11-23-2020 03:50 AM
Hello A_Levy,
Make sure you read the geomagnetic data with calibration status 3, otherwise the data will be inaccurate.
Could I know how long have you tested for this problem?
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
11-26-2020 02:21 AM
Hello thanks for your reply. Weve been testing for this problem over the course of weeks. Each data collection we do is on the scale of 1-5 minutes.
Still looking for something?
- Top Results