Bosch Sensortec Community
- Top Results
- Bosch Sensortec Community
- Discuss
- MEMS sensors forum
- Re: BME280 relative altitude not stable
BME280 relative altitude not stable
- Subscribe to RSS Feed
- Mark Topic as New
- Mark Topic as Read
- Float this Topic for Current User
- Bookmark
- Subscribe
- Mute
- Printer Friendly Page
BME280 relative altitude not stable
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
11-22-2019 10:45 AM - edited 11-22-2019 10:46 AM
Hi all,
I'm using a BME280 sensor to estimate the realtive altitude of an object, but the results are not really stable.
This is the formula I use:
float heightOutput_mm = (44330.77f * 1000.0f) * (1.f - pow((p1 / p0), 0.190294957f));
Where:
- p1 -> current pressure
- p2 -> reference pressure taken at ground level
The problem is that keeping the object STATIC at ground level I get a very highly changing relative altitude in the range [-0.5,+0.5] m
The sensor is configured in as suggested in the datasheet for INDOOR NAVIGATION:
bme280_dev.settings.osr_h = BME280_OVERSAMPLING_1X;
bme280_dev.settings.osr_p = BME280_OVERSAMPLING_16X;
bme280_dev.settings.osr_t = BME280_OVERSAMPLING_2X;
bme280_dev.settings.filter = BME280_FILTER_COEFF_16;
bme280_dev.settings.standby_time = BME280_STANDBY_TIME_0_5_MS;
Any suggestion to inprove the stability of the readings?
Thank you
Walter
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
11-25-2019 09:56 AM
The relative accuracy for the pressure part of the BME280 is 12pa -> 96cm. The highly changing relative altitude in the range [-0.5,+0.5] m is acceptable.
Could you please provide the ground truth and the height value you measured?
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
11-26-2019 11:13 AM - edited 11-26-2019 11:16 AM
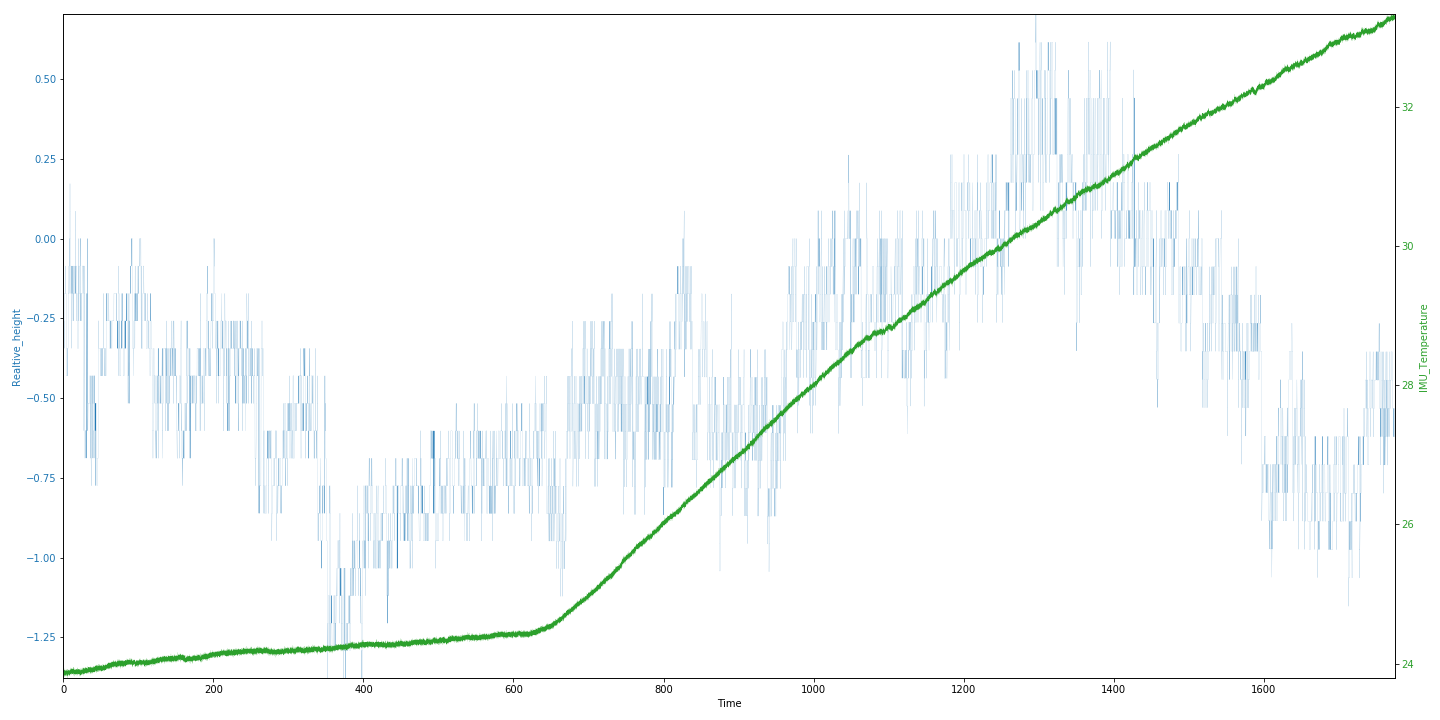
My ground truth is "zero" since I'm not measuring the altitude relatively to the sea level, but to the first value I get from the barometer (the sensor is steady).
This is the formula that I use to estimate the relative altitude:
float rel_height_m = ((pow((p0 / p1), 1.f/5.257f) - 1.f) * (temp + 273.15f)) / 0.0065f;
where:
- p0: reference pressure
- p1: current pressure
- temp: current sensor temperature
Attached a 30' plot of the relative altitude
{kind=link}
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
11-26-2019 12:47 PM
Your plot suggests a testing time of of 30 minutes. Without a reference sensor, there is no way to real real pressure change (Building ventilation, doors/windows opening, weather, etc.) with sensor drift.
Do you have access to a reference pressure sensor?
o_o
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
11-26-2019 01:04 PM
I have not a pressure reference sensor... I search for one. Any suggestion?
Still looking for something?
- Top Results