Bosch Sensortec Community
- Top Results
- Bosch Sensortec Community
- Discuss
- MEMS sensors forum
- BNO055 unreliable calibration & heading readings
BNO055 unreliable calibration & heading readings
- Subscribe to RSS Feed
- Mark Topic as New
- Mark Topic as Read
- Float this Topic for Current User
- Bookmark
- Subscribe
- Mute
- Printer Friendly Page
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
06-08-2022 01:25 PM
BNO055 unreliable calibration & heading readings
I'm having difficulty with reliable heading in DNOF mode. I find it can drifts as much as +/- 20 degrees.
There are many questions I have regarding this. But, as they are all related, I will put them all here in a number list:
1. Power cycling calibration status
I find power cycling effects the accuracy / reliability of the calibration status.
- I calibrate the unit so all 4 calibration status (ACC GYRO MAG SYS) read 3, then save the OFFSET & RADIUS regs to NV storage.
- I then power-down the compass (remove the power)
- I then power-up the compass & restore the OFFSET & RADIUS registers.
- I then check the calibration status & it is no longer calibrated. In some instances NONE of the 4 are 3
2. Power cycling heading reading
I find power cycling effects the accuracy / reliability of the heading reading.
- I calibrate & save as detailed above.
- I then power-down the compass (removed the power)
- I then power-up the compass in different orientations & restore the OFFSET & RADIUS registers
- I read the heading & it is usually around 0 degrees regardless of the orientation
Always powered-up
I have changed my design to try the compass always powered-up while the battery is connected. This makes an improvement in both cases above, but this is not how I want the design.
I even put the compass into suspend mode on power-down & then back into normal mode at power-up.
3. When / how often should the calibration data to read / restored?
If I have to adopt the always powered-up approach, then the compass will be powered for long periods of time. How often should I read the OFFSET & RADIUS registers into NV storage?
4. Heading drift
I find that the heading drifts. IF I orient the compass in one direction, not change any compass settings, but just turn thru 360 degrees, or move the compass in some random way, the heading can be up to 30 degrees wrong.
5. Absolute heading
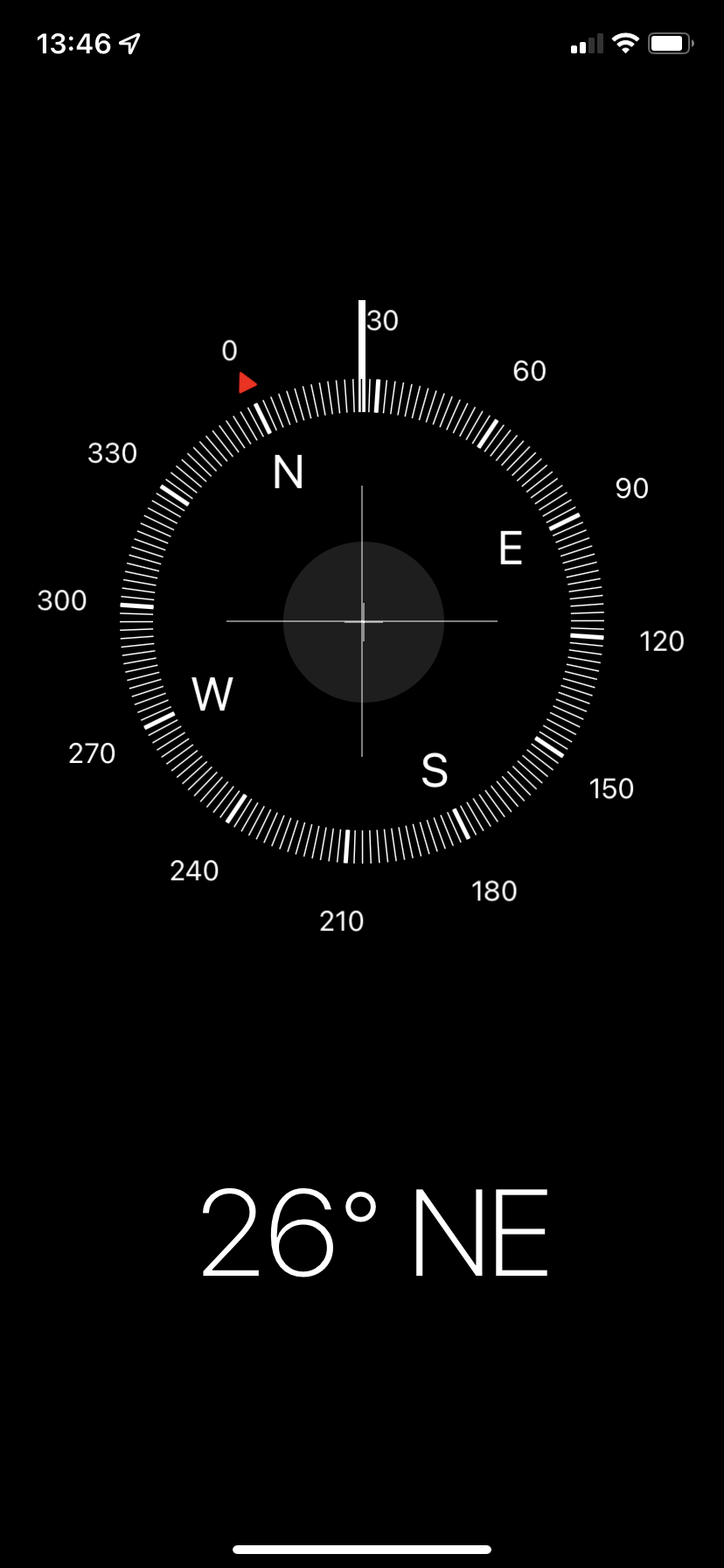
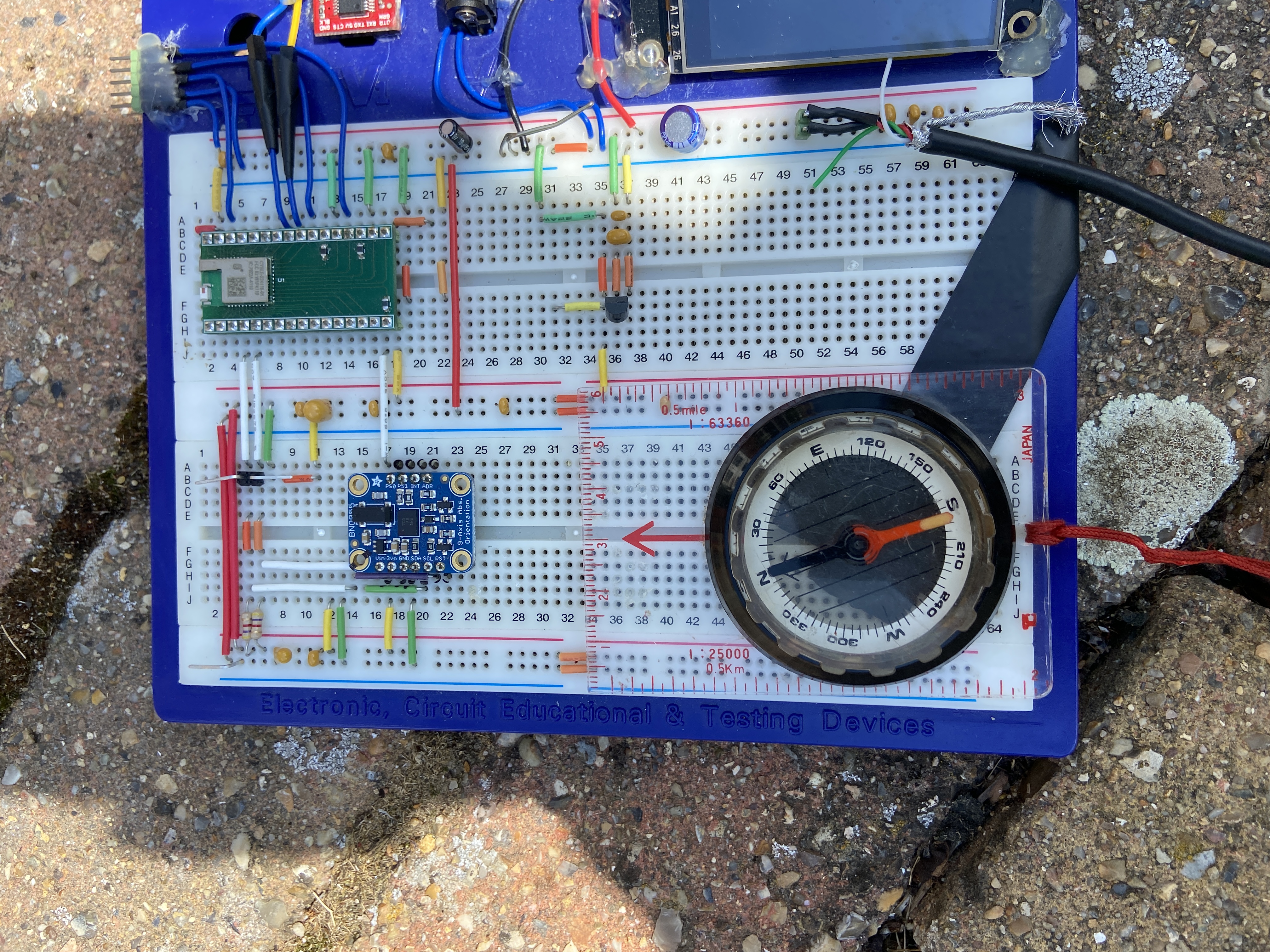
I find that the compass does not point north to match my magnetic compass, of my iPhone compass. (NB my magnetic compass & iPhone compass match each other photos attached)
This is was a fully calibrated BNO055 with all 4 CALIB STAT read 3’s
Solved! Go to Solution.
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
09-09-2022 11:15 AM
I've found the BHI260AP https://www.bosch-sensortec.com/products/smart-sensors/bhi260ap which mentions the "BHI260AP shuttle board 3.0". This is fitted with the BHI260AP & BMM150.
Also the BST-BHI260AP-FL000 https://www.bosch-sensortec.com/media/boschsensortec/downloads/product_flyer/bst-bhi260ap-fl000.pdf talks about the Software feature saying "...support for increasing number of activities without the need to modify the original software."
Does this suggest the device is already programmed with this software. Or is the software stofed in off-chip FLASH (which is also fitted to the "BHI260AP shuttle board 3.0"?
I want to buy an evaluation board which will (hopefully) plug-n-play so I can evaluate the funtions & performance without having to spend lots of time & effort installing & learnig new dev tools. I know I may need to do this going forward, but it this stage I need a to evaluate your solution & demo this to my customer so we can be sure it performs to a level acceptable to my customers requirements.
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
09-14-2022 08:21 AM
Hi Digisolve,
There were BMM150, Flash on BHI260AP shuttle board, more detailed could be found from https://www.bosch-sensortec.com/media/boschsensortec/downloads/shuttle_board_flyer/application_board...
BHI260AP software on github: https://github.com/BoschSensortec/BHY2-Sensor-API
Run the example load_firmware to upload firmware to Flash memory.
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
09-14-2022 10:52 AM
Sorry I'm not clear. This only has a .C & makefile

- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
09-14-2022 12:15 PM
Basically I want to get the orientation information which is shown the General Settings -> System tab

I'll explain what I have done & hopefully you can explain what i'm missing:
- Connected Application Board 3.0 & BHI260AP Shuttle Board 3.0
- Installed & run Development Desktop 2.0
- Downloaded Bosch_APP30_SHUTTLE_BHI260_aux_BMM150-flash.fw (dated: 16/05/2022 save: 115K) from C:\Program Files\Bosch Sensortec\Development Desktop 2.0\Firmware\BHI260AP\Flash Images
- Set Sample Rate to 25Hz for Acceleromter Passthough(Non-Wakeup)
- Set Sample Rate to 25Hz for Gyroscope Passthough(Non-Wakeup)
- Set Sample Rate to 25Hz for Magnetomoter Passthough(Non-Wakeup)
- Plot1 is already Acceleromter Passthough(Non-Wakeup)
- Changed Plot2 to Gyroscope Passthough(Non-Wakeup)
- Changed Plot3 to Magnetomoter Passthough(Non-Wakeup)
- Start Streaming and the plots get populated, but not the Orientation values
- Stop Streaming and press Refresh but get the error Host Download Channel Underflow(Host Read Too Fast)
- Slowed the Interface Selection -> Sensor Interface down to 1000Kbps, (I had to set everthing up again!)
- Started & stopped streaming. This time the Refresh showed no errors, but the Orientation was still not populated

Here's the about box for my install of Development Desktop 2.0 Beta - BHI260AP
(should is be Beta?)

I just need to know exactly how to setup this dev system so I can evaluate the pitch/roll/heading performance in real time (just like I did with the BNO055)
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
09-14-2022 12:57 PM
Just to let you know I've updated the firmare. It's now 1.9. But I still canot do what I need to


{kind=link}
{kind=link}
Still looking for something?
- Top Results