Bosch Sensortec Community
- Top Results
- Bosch Sensortec Community
- Discuss
- MEMS sensors forum
- Re: BNO055 unstable system calibration affecting data quality
BNO055 unstable system calibration affecting data quality
- Subscribe to RSS Feed
- Mark Topic as New
- Mark Topic as Read
- Float this Topic for Current User
- Bookmark
- Subscribe
- Mute
- Printer Friendly Page
BNO055 unstable system calibration affecting data quality
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
11-26-2020 02:33 AM - edited 11-26-2020 02:34 AM
Hello All,
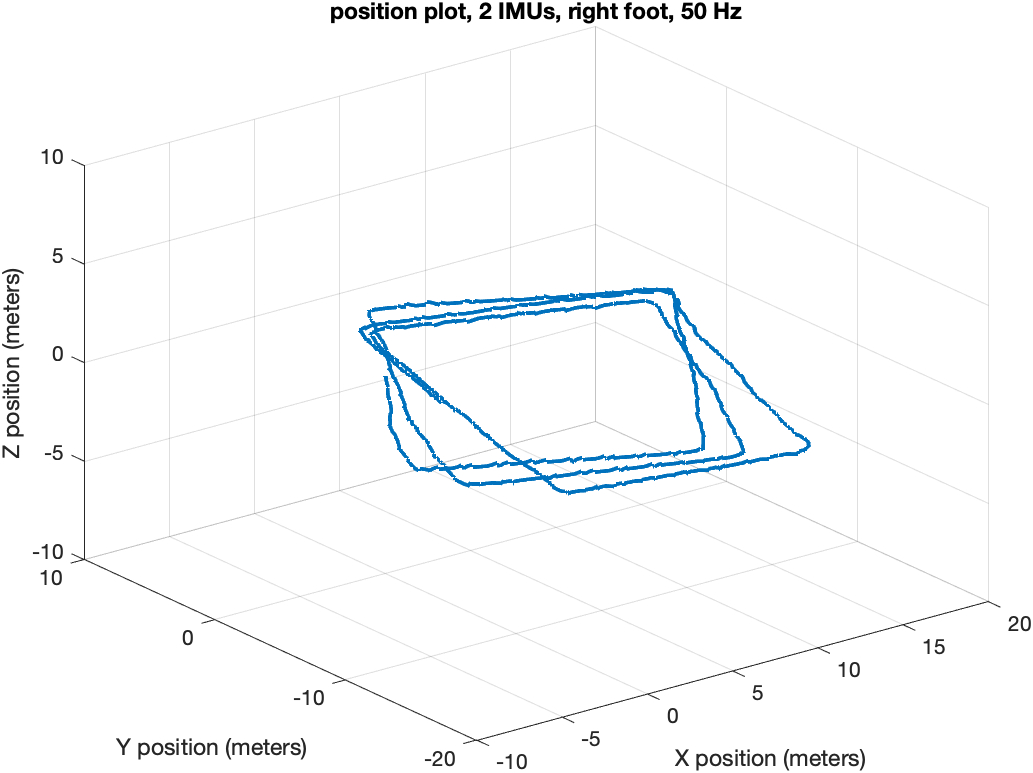
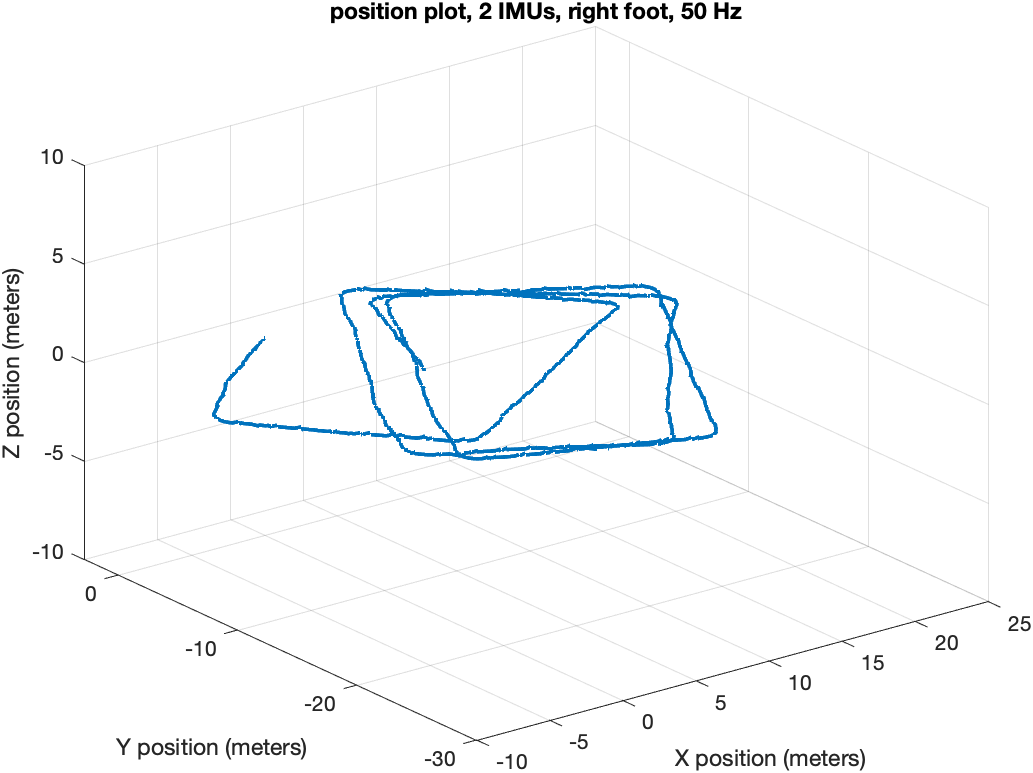
I am using two wearable BNO055 sensors for inertial navigation. I am using 9DOF mode. At the end of my calibration the CA = 3, CG = 3, and CM = 3, however CS is unstable and fluctuates between 0-3.
I have read other forums that say this instability of CS does not affect data quality, however, i have nearly every reason to believe that it is affecting our data quality, because we are seeing signifigant heading drift with our sensor.
I have attached two photo of our inertial naviagation after walking in a square. From the piture you can see that the heading drifts substantially over time. The two photos are from the same data collection and "should" be identical.
When i read the calibration values from the data collection, the CA, CG, and CM are all 3, but the CS ranges from 0-3 (and is 0 or 1) the majority of the time.
Am i not using the correct firmware? Does anyone have any ideas how to deal with this problem?
Thank you!
{kind=link}
{kind=link}
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
11-26-2020 02:45 AM
Hi Adam,
I am seeing the exact same issue. My system calibration status is unstable although the gyroscope, accelerometer and magnetometer all report that they are calibrated. I am also seeing that the heading is drifting when I am collecting data (using NDOF mode as well).
In my project, I am using older BNO055 sensors (from 2017) and I saw that in another post regarding this that this issue could be related to the firmware version of the BNO. Is it possible that older BNO sensors have this issue?
I'm looking forward to seeing the solutions to this problem as well.
Thanks
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
11-27-2020 09:41 AM
Any ideas on what might be causing this. I have attached a CSV file to provide an example if what i am talking about.
In the CSV file the calibration data and statuses can be found in solumns AT to AW.
If anyone knows what may be happening please feel free to share some ideas. Our CS value is frequecntly 0 but occassionally jumps around from 0-3.
Thank you
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
12-07-2020 07:02 PM
Document about how to update the BNO055 FW as well as the latest BNO055 FW version 03.20 was shared.
I will wait for the update from test result with latest BNO055 FW.
Still looking for something?
- Top Results