Bosch Sensortec Community
- Top Results
- Bosch Sensortec Community
- Discuss
- MEMS sensors forum
- Re: Using BMP388 for floor detection of moving people/equipment
Using BMP388 for floor detection of moving people/equipment
- Subscribe to RSS Feed
- Mark Topic as New
- Mark Topic as Read
- Float this Topic for Current User
- Bookmark
- Subscribe
- Mute
- Printer Friendly Page
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
12-23-2020 09:16 AM
Hello Bosch Community,
I am using BMP388 sensor for detecting which level a particular moving asset is located. For this purpose, I have mounted hardware with BMP388 sensor on the wall of each level , which measures pressure and temperature every 10 mins.
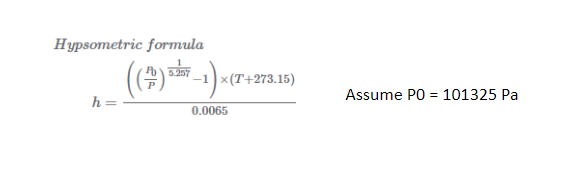
The moving asset is also fitted with hardware with BMP388 sensor that measures pressure and temperature every 3 minutes. To detect which floor the moving asset is on, I calculate the height from measured pressure (using formula in attached image) for the fixed hardware and moving hardware and compare the height of the moving asset with that of the one mounted on the wall.
However, I noticed that in most of the cases, the difference in measured height of wall-mounted and moving asset sensor varies upto 20 m.
For the sensor in both moving and fixed hardware, I am using forced mode, oversampling of 32 for pressure, oversampling of 2 for temperature, filter enabled with coefficient of 15 (i.e register value of 0x04).
1. Is there a way to minimise this difference between the readings reported by the moving & fixed hardware?
2. In some cases, the temperature of the fixed hardware and moving asset are different, due to which the difference in height readings also increases. Is there a way to remove the effect of temperature on the readings?
Thanks,
Anusha
Solved! Go to Solution.
{kind=link}
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
12-30-2020 02:52 AM
Hi Sir:
Please see my comments:
1. Yes, the second calibration has to be done due to soldering.
2. There are small variation in sensor A and sensor B's readings when placed in the same environment, but these can be ignored. It is better for calibration under the same stable environments. Consider the different performantce of the different pressure sensor, these gap will be bigger or smaller with pressure change or temperature change and not over the accumulated values of the relative accuracy with 100hPa step.
3. Yes, after soldering, calibration is recommended.
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
01-03-2021 11:00 AM
Hi Jet,
Thanks for your inputs. This is very helpful.
Regards,
Anusha
- « Previous
-
- 1
- 2
- Next »
Still looking for something?
- Top Results