Bosch Sensortec Community
- Top Results
- Bosch Sensortec Community
- Discuss
- MEMS sensors forum
- Re: BNO055 Accelerometer Expected Repeatability in NDOF Mode?
BNO055 Accelerometer Expected Repeatability in NDOF Mode?
- Subscribe to RSS Feed
- Mark Topic as New
- Mark Topic as Read
- Float this Topic for Current User
- Bookmark
- Subscribe
- Mute
- Printer Friendly Page
BNO055 Accelerometer Expected Repeatability in NDOF Mode?
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
07-01-2021 06:13 PM - edited 07-01-2021 06:15 PM
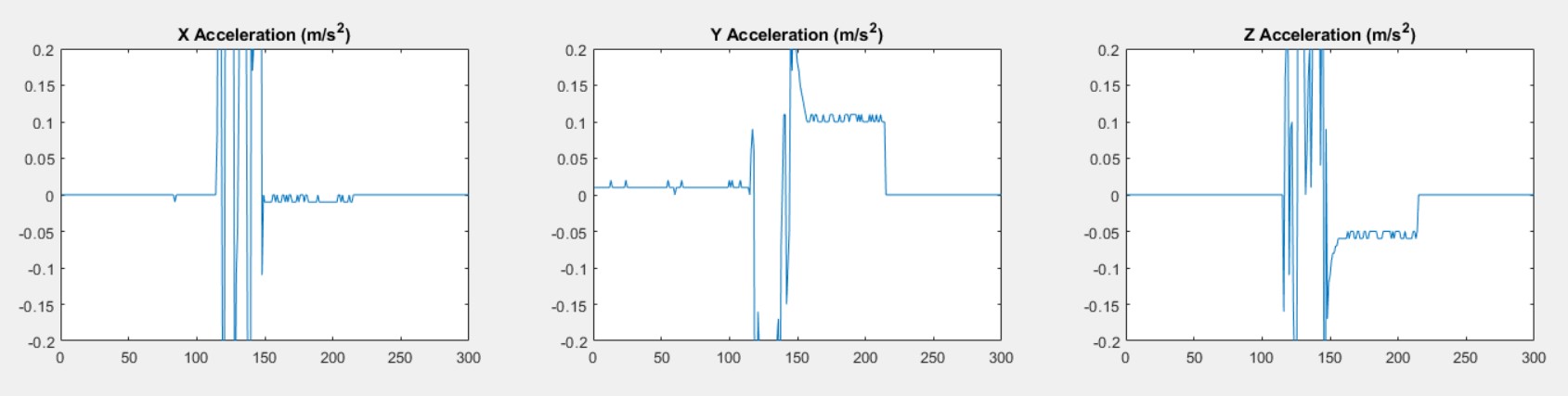
I'm attempting to keep track of the velocity of a slow-moving object (about 6" / sec) over the span of 30 seconds to a minute. I'm trying to keep accelerometer noise under control by averaging 32 samples before sending the averaged data point over to Matlab for processing, which seems to be working fairly well. The issue I'm seeing is that after picking up the sensor and setting it back down, the zero-acceleration offset seems to shift, this is illustrated in the attached screenshot. Ignore any data after 210 on the X axis, nothing has been collected from there on. Data is from the LIA_DATA_* registers and divided by 1000. I'm using NDOF mode.
So I have two questions:
- Would a more precise calibration procedure eliminate this issue? I'm simply standing an Adafruit breakout board on its ends at the moment, which isn't perfectly stable.
- Is it reasonable to try to keep track of an object moving this slowly with this sensor or have I been doomed to fail from the start?
Thanks!
{kind=link}
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
07-09-2021 09:05 AM
Hello dustin_,
Generally, the zero drift is evaluated when the sensor is stationary, not when the data changes during the movement.
Still looking for something?
- Top Results