Bosch Sensortec Community
- Top Results
- Bosch Sensortec Community
- Discuss
- MEMS sensors forum
- Re: BNO055 high Euler Angles Drift with Vibration
BNO055 high Euler Angles Drift with Vibration
- Subscribe to RSS Feed
- Mark Topic as New
- Mark Topic as Read
- Float this Topic for Current User
- Bookmark
- Subscribe
- Mute
- Printer Friendly Page
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
02-17-2021 04:30 PM - edited 02-18-2021 07:40 AM
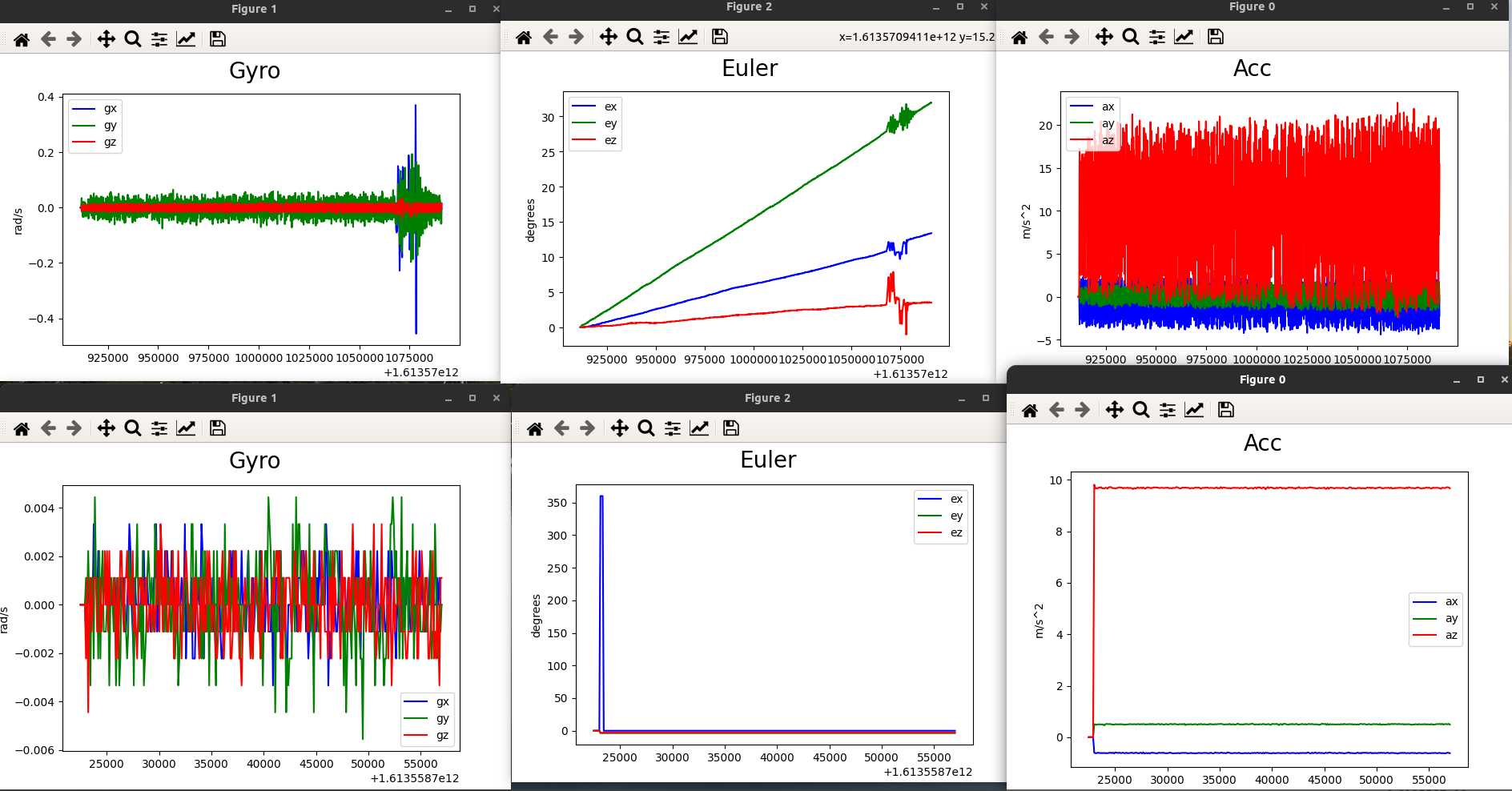
I've recently bought BNO055 to measure my vehicles RPY angles. However given RPY values are steadly increasing even the vehicle is standing still.
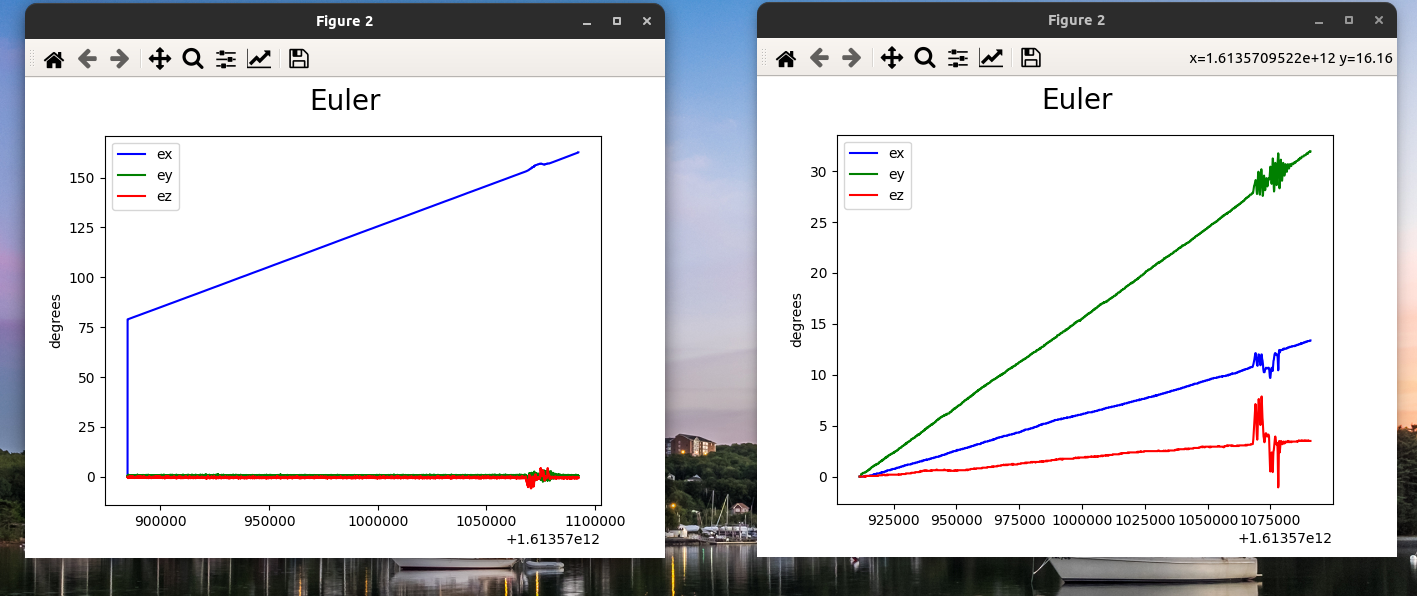
I've conducted several tests to gather some data. For reference purposes I put some cheap IMU side by side to compare results. However cheap IMU is giving much more stable resulsts than BNO055.
Note0: Bosch imu is fully calibrated and the results are not changing by updating modes. I've tried to recalibrate too.
Note1: I tried to get fused quaternions and they are still drifting.
Note2: I uploaded the log data to github.
I've attached the results below. First Picture compares Bosch IMU with/without vibration. Second picture compares bosch and reference IMU with vibration present.
Thanks.
Solved! Go to Solution.
{kind=link}
{kind=link}
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
03-10-2021 02:46 AM
Hi Sir:
To get the valid data, you should ensure that magnetometer other sensor status hold at 3 without hard iron interference in NDOF mode.
If it is not stable, check your hardware or ambient environment.
0x00/0x01/0x02/0x03/0x04 at page 1 in register maps, you can get all versions of BNO055.
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
02-05-2023 06:42 PM
hi, have you figured out a solution to your problem. i am afraid i might run into same issue
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
02-06-2023 09:11 AM
BNO055 has been discontinued and is not recommended for use in new designs.
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
02-06-2023 10:49 AM
And i just bought it for IMU purposes
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
02-17-2023 07:54 AM
Hi MazenElashry,
You could consider to use the two solution:
1.IMU + MAG + host MCU fusion algorithm
IMU: BMI088, BMI270
MAG: BMM150, BMM350(coming soon)
Host MCU fusion algorithm: BSXFull
2.Smart sensor(integrated fusion algorithm) + MAG
Smart sensor(integrated IMU,BSX algorithm): BHI260AP, BHI360(coming soon)
MAG: BMM150, BMM350(coming soon)
Still looking for something?
- Top Results