Bosch Sensortec Community
- Top Results
- Bosch Sensortec Community
- Discuss
- MEMS sensors forum
- Re: BNO055 0 for all values
BNO055 0 for all values
- Subscribe to RSS Feed
- Mark Topic as New
- Mark Topic as Read
- Float this Topic for Current User
- Bookmark
- Subscribe
- Mute
- Printer Friendly Page
BNO055 0 for all values
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
02-22-2023 08:21 PM
Hi,
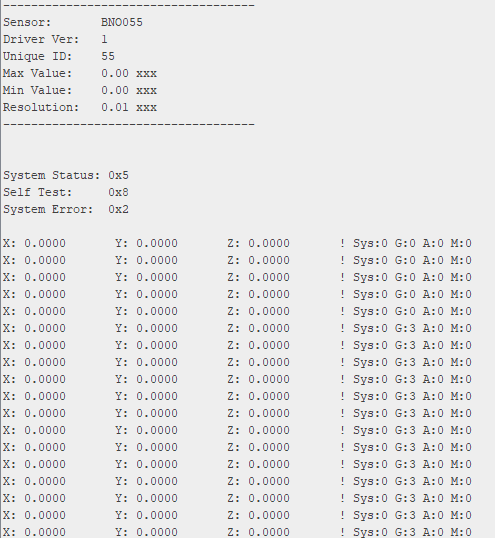
I have recently created a custom PCB using the BNO055 and an ESP32. I am getting 0 for all my orientation values and failing the self-test for the gyroscope, magnetometer, and accelerometer. The gyro calibration value is 3 and the magnetometer and accelerometer are not calibrated.
I have tried resoldering the chip and I am still getting the same results.
Thank you for your help,
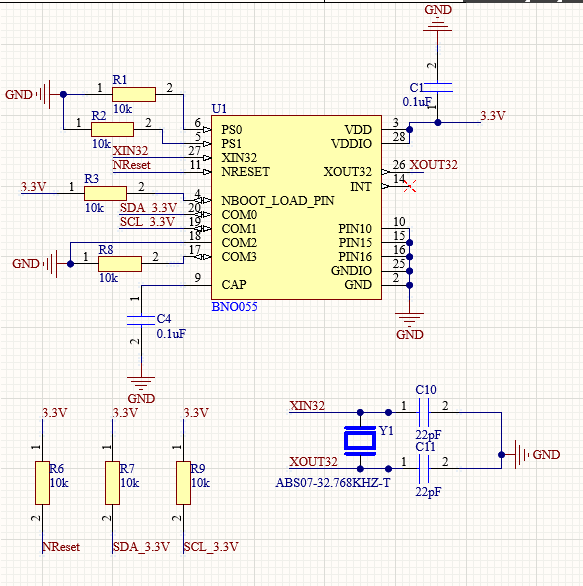
I have attached the code, schematic, and outputs.
{kind=link}
{kind=link}
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
02-23-2023 09:19 AM
Hi SD_G17,
BNO055 has been discontinued and is not recommended for use in new designs.
You could consider to use the two solution if you would like to use 9doF in your application.
1.IMU + MAG + host MCU fusion algorithm
IMU: BMI088, BMI270, BMI323, etc.
MAG: BMM150, BMM350(coming soon)
Host MCU fusion algorithm: BSXFull
2.Smart sensor(integrated fusion algorithm) + MAG
Smart sensor(integrated IMU,BSX algorithm): BHI260AP, BHI360(coming soon)
MAG: BMM150, BMM350(coming soon)
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
02-24-2023 06:22 PM
I realize that this is an old product and I should have used a newer version but, due to previous testing with the development boards before making our custom PCB, we aren't able to change out to a different IMU currently. Is there any way to determine if the design is incorrect or if there is an issue with the actual chip?
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
03-19-2023 04:19 PM
Hi SD_G17,
The sensor in your schematic is BMI270, your software code accesses BNO055, can you check why you use it like this?
Still looking for something?
- Top Results